|
|
|
@@ -127,10 +127,9 @@ |
|
|
|
For readability, the result has to be readable from 4 meters distance. |
|
|
|
|
|
|
|
The specifications itself are written with \ac{ears} and are as follows: |
|
|
|
\begin{itemize} |
|
|
|
\begin{enumerate} |
|
|
|
\item The Writer shall be able to write at least 50 characters per line. |
|
|
|
\item The Writer shall be able to write at least 5 lines of text. |
|
|
|
\item The Writer shall display the author, time, content, and number of retweets, favorites and replies in plain-text. |
|
|
|
\item The Writer shall plot characters with a size that is readable from 4 meters for a person with good eyesight. |
|
|
|
\item The Writer shall plot in a regular used font with corresponding character spacing. |
|
|
|
\item When a new tweet is send to the Writer, the Writer, shall wipe the existing tweet and write down a new tweet. |
|
|
|
@@ -140,7 +139,7 @@ |
|
|
|
\item When a reset-signal is send to the Writer, the Writer shall recalibrate its position on the board. |
|
|
|
\item When a wipe-signal is send to the Writer, the Writer shall wipe the board clean. |
|
|
|
\item The Writer shall not damage itself. |
|
|
|
\end{itemize} |
|
|
|
\end{enumerate} |
|
|
|
|
|
|
|
Additionally there are some restrictions on construction. |
|
|
|
The tooling in limited to some hobby/DIY tools. |
|
|
|
@@ -183,6 +182,7 @@ |
|
|
|
\end{itemize} |
|
|
|
|
|
|
|
\subsection{Initial Design} |
|
|
|
\label{sec:initialdesign} |
|
|
|
\rro{Research on Existing Systems} |
|
|
|
The initial design started with a design space exploration. |
|
|
|
The goal was to collect possible solutions and ideas for the implementation. |
|
|
|
@@ -252,6 +252,14 @@ |
|
|
|
It was therefore decided to combine a small SCARA with a cable driven robot. |
|
|
|
Where the SCARA can write a couple of characters at high speed from a fixed position. |
|
|
|
The cables can than move the complete SCARA to the next position. |
|
|
|
The full setup can be seen in \autoref{fig:general_design}. |
|
|
|
\begin{figure} |
|
|
|
\centering |
|
|
|
\includegraphics[width=\linewidth]{graphics/general_design.pdf} |
|
|
|
\caption{Rough design of the system. The carriage is in this situation blue and the SCARA is red. The two cable running to the top-corners of the whiteboard move the carriage.} |
|
|
|
\label{fig:general_design} |
|
|
|
\end{figure} |
|
|
|
|
|
|
|
|
|
|
|
The combined system introduces sufficient complexity for the design method. |
|
|
|
The cable robot and SCARA are both sub-systems of the complete writing robot that can be implemented separately. |
|
|
|
@@ -319,7 +327,7 @@ |
|
|
|
\rroi{Additionally, division of system requirements} |
|
|
|
\rro{Expected: A list of features, with corresponding dependencies} |
|
|
|
\rro{Could define features, but non of them described mechanical components that could be implemented.} |
|
|
|
\rro{Result: Improvised a structure that was loosely based on Robmosys} |
|
|
|
\rro{Result: Improvised a structure that was loosely based on RobMoSys} |
|
|
|
\rroi{The lose features:} |
|
|
|
\rroii{End-effector} |
|
|
|
\rroii{SCARA} |
|
|
|
@@ -337,29 +345,254 @@ |
|
|
|
Even though, there is a feature definition that can be used in the next step, there remain a couple of difficulties. |
|
|
|
There is still a really strong border between features and components. |
|
|
|
And the single level of components makes it impossible to depict the dependencies between components. |
|
|
|
Developing larger and complexer systems will have sub-components in the system, introducing even more dependencies. |
|
|
|
Developing larger and complex systems will have sub-components in the system, introducing even more dependencies. |
|
|
|
Therefore, this is not a valid solution for feature definition. |
|
|
|
Fortunately the current solution suffices to continue the case study. |
|
|
|
|
|
|
|
\subsection{System Test Specification} |
|
|
|
The last step of the preliminary design is to design tests. |
|
|
|
The tests are designed around the specifications. |
|
|
|
However, during the creation of the tests it was found that the list of specifications were lacking. |
|
|
|
Furthermore, the previous steps did not provide any order of operation. |
|
|
|
During this step the order of operation and additional specifications are determined. |
|
|
|
|
|
|
|
There are two modes of operation: writing and wiping. |
|
|
|
The writing operation can be split in the following steps: |
|
|
|
\begin{enumerate} |
|
|
|
\item Move cable driven carriage to position of characters. |
|
|
|
\item Write three characters with the SCARA. |
|
|
|
\item Repeat step 1 and 2 till the Tweet is on the board. |
|
|
|
\item Move carriage away from the text on the board. |
|
|
|
\end{enumerate} |
|
|
|
|
|
|
|
The other operation is wiping. |
|
|
|
This is similar to the operation of writing with the following steps: |
|
|
|
\begin{enumerate} |
|
|
|
\item Move cable driven carriage to position of characters. |
|
|
|
\item Clear the area in reach of the SCARA. |
|
|
|
\item Repeat step 1 and 2 till the Tweet is removed from on the board. |
|
|
|
\end{enumerate} |
|
|
|
Furthermore, switching between the states requires the tool to be switched. |
|
|
|
As this is a difficult operation there are not yet requirements or order of operation specified. |
|
|
|
|
|
|
|
Based on the order of operation, the following specifications were added to the list in \autoref{sec:specifications}: |
|
|
|
\begin{enumerate} |
|
|
|
\setcounter{enumi}{11} |
|
|
|
\item While writing, the SCARA shall have a writing speed of at least 1.5 characters per second. |
|
|
|
\item When the Carriage/base of the SCARA is at a static position, the SCARA shall be able to write at least 3 characters at that position. |
|
|
|
\item When the SCARA finished writing at their current position, the Carriage shall move the SCARA to it's next position where it can write the subsequent characters. |
|
|
|
\item When the SCARA has to be moved to a new position, the Carriage shall perform this movement within 1 second. |
|
|
|
\end{enumerate} |
|
|
|
These additional specifications are also based on the combined system decission that was made in section \autoref{sec:initialdesign}. |
|
|
|
These specifications distribute responsibility between sub-components. |
|
|
|
|
|
|
|
With the updated specifications it was possible to create a number of test cases. |
|
|
|
In total there are five small test cases and four large test cases. |
|
|
|
The small tests cover a sub-system and the large tests apply on the complete systems. |
|
|
|
Each tests has a list of specifications that are covered with the test and for smaller tests the subsystem under test is also determined. |
|
|
|
With a short description it is described how the test should be performed. |
|
|
|
|
|
|
|
One of the small tests is performed by drawing a square: |
|
|
|
\begin{description} |
|
|
|
\item[Sub-systems] SCARA |
|
|
|
\item[Specifications] 3, 7, 11, 13 |
|
|
|
\item[Description] |
|
|
|
The SCARA must draw a square of at least 50 mm high and 70 mm wide. |
|
|
|
This box is large enough to draw at least 3 characters. |
|
|
|
This square should be drawn within one second. |
|
|
|
If it is slower than that, it is not able to achieve specification 7. |
|
|
|
\end{description} |
|
|
|
\rrot{TODO: Make clear that the tests case ends here...} |
|
|
|
Repeatability is tested in one of the large tests. |
|
|
|
\begin{description} |
|
|
|
\item[Specifications] 3, 4, 9, 11 |
|
|
|
\item[Description] |
|
|
|
To test the repeatability of the system must do four things: |
|
|
|
\begin{itemize} |
|
|
|
\item The system will be reset. |
|
|
|
\item Draw multiple squares (60 mm x 60 mm) at a random position within the drawing range (1000 mm x 300 mm). |
|
|
|
\item The system will be reset again. |
|
|
|
\item Then in a random order, at least different from the order of squares, a circle with a 55 mm diameter must to be drawn inside the squares. |
|
|
|
\end{itemize} |
|
|
|
The test is successful if the circles are not drawn outside of the squares. |
|
|
|
\end{description} |
|
|
|
\rrot{TODO: Make clear that the tests case ends here...} |
|
|
|
\rrot{TODO: Add the tests to the appendix} |
|
|
|
All the tests are included in the appendix. |
|
|
|
\rro{Specify tests for the different specifications} |
|
|
|
\rro{Made a document with tests} |
|
|
|
\rroit{Should this document be included in the report?} |
|
|
|
\rroi{Each test covers one or more specs} |
|
|
|
\subsubsection{Evaluation} |
|
|
|
\rro{Was quite easy to perform} |
|
|
|
\rroi{Difficult due to specs and features not working out as expected} |
|
|
|
\rroi{Most features could not be tested as the subsystem needs to be completed first} |
|
|
|
\rro{Tested by peer-review} |
|
|
|
\rroi{Found that a review without all the project information is difficult} |
|
|
|
This step was completed with not many difficulties. |
|
|
|
The specific order of operation and extra specifications should not be part of this step. |
|
|
|
It was already concluded that the steps in the preliminary design were not as expected. |
|
|
|
The fact that this step resulted in an additional changes only adds to that conclusion. |
|
|
|
|
|
|
|
The design of the test cases resulted in valuable information about the system. |
|
|
|
This information would be very useful in an earlier stage of the preliminary design. |
|
|
|
|
|
|
|
\subsection{Recap} |
|
|
|
The test definitions of the last step conclude the preliminary design phase. |
|
|
|
This preliminary design shows a clear notion of a hasty execution from a design standpoint. |
|
|
|
The preliminary design was performed over a period of 5 weeks, by one developer with little experience in design documentation. |
|
|
|
This makes notion of hasty not surprising for this unproven design method. |
|
|
|
That does not mean that this preliminary design is a waste of time. |
|
|
|
From the evaluation moments during the preliminary phase there are a couple of interesting points. |
|
|
|
\begin{itemize} |
|
|
|
\item The lack of a design team with experienced engineers would drastically improve the execution of this design phase. |
|
|
|
Such a team is also able to find the smaller problems of such a design phase, which are currently completely overlooked. |
|
|
|
\item It is not possible to view each step in the design process as singular. |
|
|
|
Each step creates more insight and information about the final design. |
|
|
|
Making a very strong separation between the steps forces the developer to make decisions on to little information. |
|
|
|
\item The term features has to be split in to functions and components for a hardware design. |
|
|
|
The actual implementation are the components such that they can perform the function. |
|
|
|
\end{itemize} |
|
|
|
|
|
|
|
Another point was noticed while evaluation the complete preliminary design phase. |
|
|
|
The lack of a team makes it easy to forget documenting intuitive design decisions. |
|
|
|
Although the design method is followed as closely as possible, it often occurs that a decision is made outside of the working environment. |
|
|
|
This was noticed during the writing of this chapter that some design decisions were completely missing. |
|
|
|
However, during the next phase, these decisions do play a crucial role. |
|
|
|
Therefore, this section will give a short recap of the planned design. |
|
|
|
|
|
|
|
\subsubsection{Complete system} |
|
|
|
From the initial design the abstract shape of the design is clear. |
|
|
|
This is still in line with \autoref{fig:general_design}. |
|
|
|
The SCARA is small and can therefore move the arm quick with a fine precision. |
|
|
|
At the end of the SCARA there is a end-effector that can grab, hold, end release tool. |
|
|
|
It holds a marker while writing and with help of the SCARA it can release the marker. |
|
|
|
Then it can grab a cleaning tool to erase whiteboard. |
|
|
|
To compensate for the small reach of the SCARA, the SCARA will be mounted to a carriage. |
|
|
|
This carriage is suspended from cables and can move along the whiteboard. |
|
|
|
The cables give the system a enormous range and velocity. |
|
|
|
However, it is not very good in acceleration as cables cannot push. |
|
|
|
This makes it suitable for the large and course movements along the board, which complements the movement characteristics of the SCARA. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
\subsubsection{SCARA} |
|
|
|
The central component of the system is the SCARA. |
|
|
|
There are a couple of design options for the SCARA. |
|
|
|
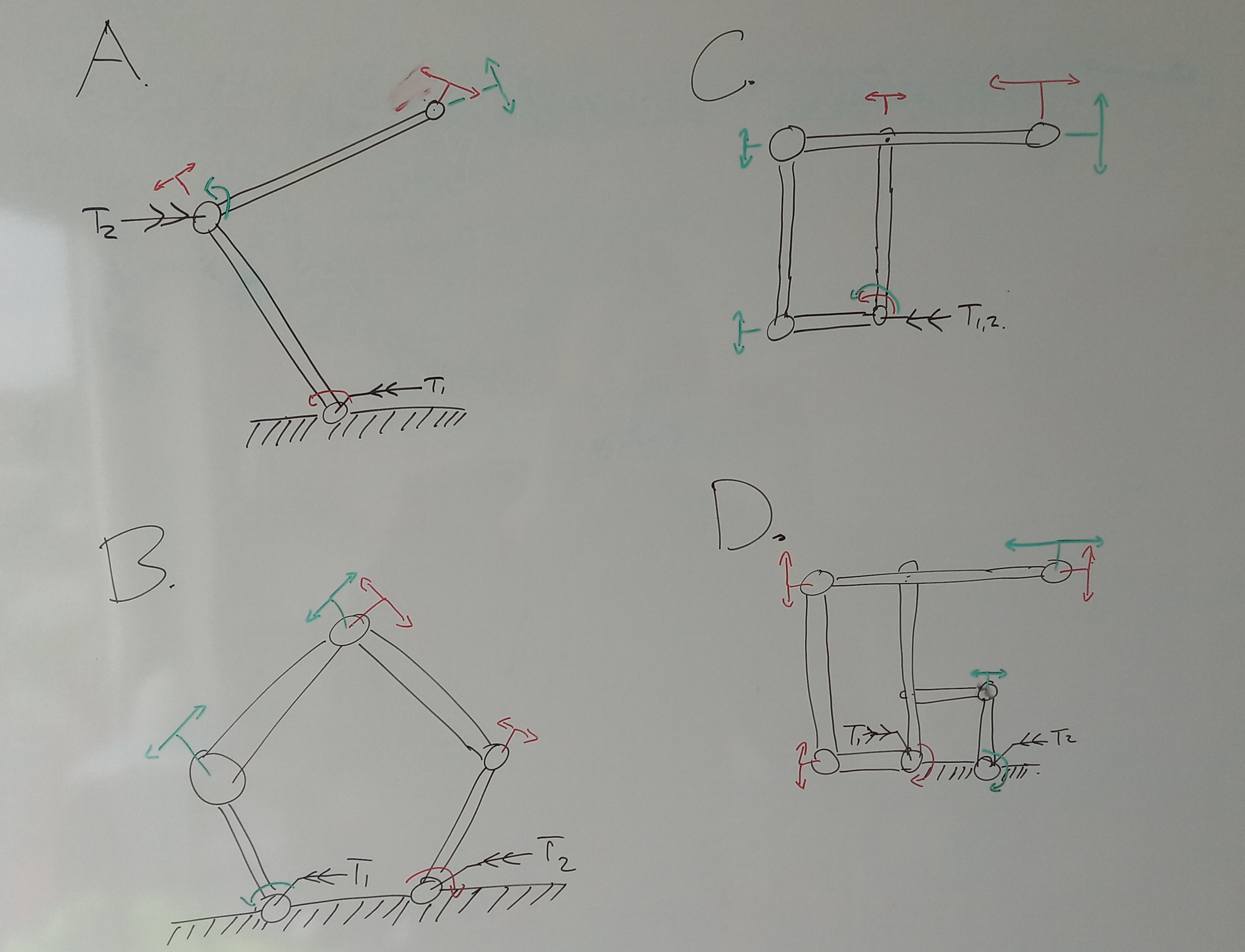
As the dynamic complexity is a important part of this design, there will be two arms. |
|
|
|
There are some different options for the configuration of the arms and their actuation. |
|
|
|
\autoref{fig:configurations} shows four of the possible configurations that are considered during the design phase. |
|
|
|
There are still options about where to place the motors and how to connect the joints. |
|
|
|
\rrot{Figure needs some graphic improvement} |
|
|
|
\begin{figure} |
|
|
|
\centering |
|
|
|
\includegraphics[width=\linewidth]{graphics/IMG_20201001_134140.jpg} |
|
|
|
\caption{Four different SCARA configurations} |
|
|
|
\label{fig:configurations} |
|
|
|
\end{figure} |
|
|
|
|
|
|
|
\subsubsection{End-effector} |
|
|
|
The end-effector is the connection between the SCARA and the tool. |
|
|
|
It has two main functions: lifting the tool from the board and switching the tool. |
|
|
|
The tool switching functionality is performed by the SCARA as well, by moving the end-effector to the right position. |
|
|
|
However, the role of the SCARA is strongly dependent\footnote{ Note, that this dependency exists but not represented in \autoref{fig:robmosys} due to the limitation of the current method.} on how the end-effector is implemented. |
|
|
|
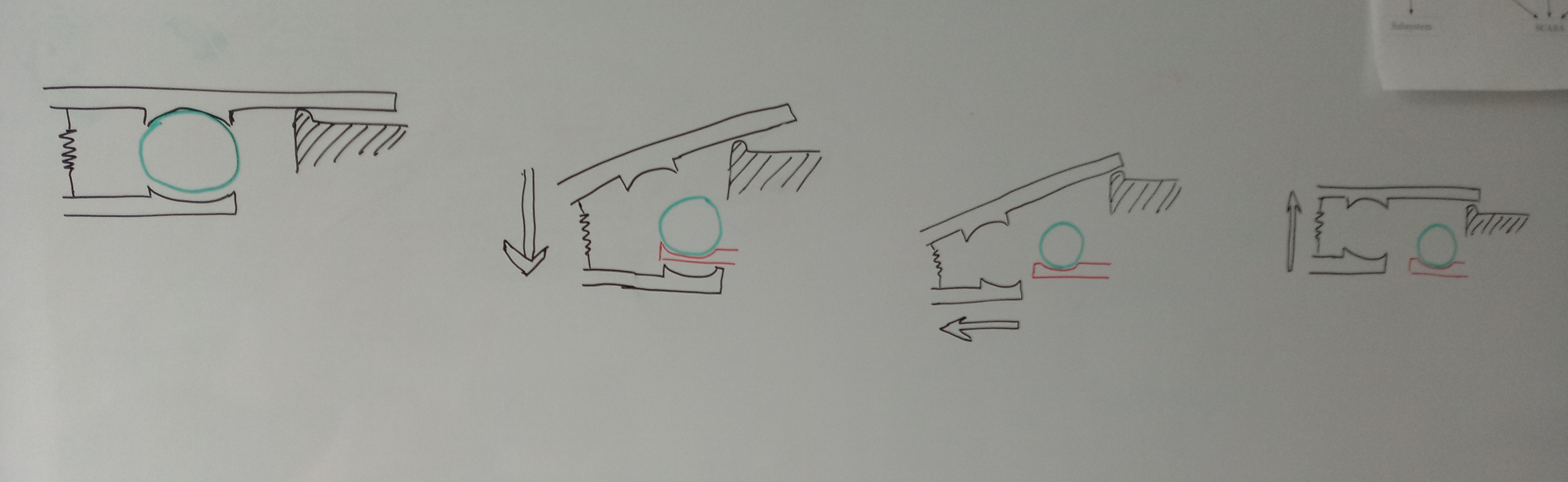
For the grabbing function there is a configuration that uses a spring-loaded clamp. |
|
|
|
Where one side of the clamp is longer so it can be opened by moving the SCARA. |
|
|
|
This operation is shown in \autoref{fig:gripper} |
|
|
|
\begin{figure*} |
|
|
|
\centering |
|
|
|
\includegraphics[width=\linewidth]{graphics/IMG_20201001_144018.jpg} |
|
|
|
\caption{Operation principle of a spring-loaded tool clamp showed from left to right. The green circle represents the tool and the red arm a tool holder. The solid ground is what pushed the upper arm open so the marker can be placed in the tool holder.} |
|
|
|
\label{fig:gripper} |
|
|
|
\end{figure*} |
|
|
|
|
|
|
|
Another dynamically simpler option is to open the clamp with a motor. |
|
|
|
The motor adds weight to the end-effector which might require the SCARA to operate slower or to be build stronger. |
|
|
|
This component is probably the most difficult one because it requires clamping of the tools. |
|
|
|
Modeling this behavior is difficult as it will involve contact dynamics. |
|
|
|
|
|
|
|
\subsubsection{Cable driven Carriage} |
|
|
|
The end-effector and the SCARA are moved all together on a carriage. |
|
|
|
The carriage will be suspended from two or four cables. |
|
|
|
A configuration with two cables is the simplest. |
|
|
|
However, the tension in this system is generated by the gravitational pull. |
|
|
|
This introduces limitations in the acceleration of the system. |
|
|
|
If the carriage moves upwards and the cable pulleys stop. |
|
|
|
The carriage is only decelerated by the force of gravity. |
|
|
|
Moving over its set point, followed by crashing down in to the cables. |
|
|
|
|
|
|
|
However, making the system with four motorized pulleys makes the system over constrained. |
|
|
|
This will solve the acceleration problem. But it will create a difficult positioning system. |
|
|
|
As all the wires have to be tensioned but not distort the movement by restricting the other motors. |
|
|
|
|
|
|
|
\subsubsection{Electronics} |
|
|
|
Although this mainly is a hardware design, there is going to be some control-software. |
|
|
|
For this the likely option is a STM nucleo board with RIOT-OS as a embedded OS. |
|
|
|
This choice is mainly because of previous experience and local knowledge of the operating system. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
\section{Detail Design} |
|
|
|
\subsection{Feature Selection: First Iteration} |
|
|
|
\subsubsection{Selection} |
|
|
|
With the preliminary design finished the first feature can be implemented. |
|
|
|
Therefore, it has to be determined what that first feature is. |
|
|
|
This is followed by building a basic model of the first feature. |
|
|
|
Over multiple cycles detail will be added to that model. |
|
|
|
When the model is sophisticated enough these steps are repeated for the next feature. |
|
|
|
\subsection{First Feature Selection} |
|
|
|
Three different components were defined as hardware features that could be implemented. |
|
|
|
The feature selection method as defined in \autoref{sec:feature_selection} will be applied to these features. |
|
|
|
According to the method, the dependencies, test coverage and risk/time factor have to be determined. |
|
|
|
All the information for this selection is shown in \autoref{tab:firstfeatureselection} |
|
|
|
\begin{table}[] |
|
|
|
\caption{Overview of the different features and their dependencies, number of tests that can be completed and the risk/time factor. |
|
|
|
The risk/time factor is calculate as risk divided by time with \emph{low} = 1, \emph{medium} = 2 and \emph{high} = 3.} |
|
|
|
\label{tab:firstfeatureselection} |
|
|
|
\begin{tabular}{llllll} |
|
|
|
\hline |
|
|
|
Feature & Dependency & Tests & Risk & Time & Risk/Time \\ \hline |
|
|
|
Scara & End-effector & 3 & medium & medium & 1 \\ |
|
|
|
End-effector & - & 2 & high & medium & 1.5 \\ |
|
|
|
Carriage & - & 2 & low & medium & 0.5 \\ \hline |
|
|
|
\end{tabular} |
|
|
|
\end{table} |
|
|
|
|
|
|
|
The SCARA is dependent on the end-effector, as was explained in the initial design. |
|
|
|
However, for the carriage no dependency was defined even though it has to lift the other two components. |
|
|
|
This is mainly because the behavior of the SCARA changes depending on the end-effector, resulting in a possible design change. |
|
|
|
For the carriage it only changes the mass that has to be lifted. |
|
|
|
Upgrading the motor torque is a minor parametric change and the dependency is therefore insignificant. |
|
|
|
|
|
|
|
The testing number is directly the number of tests that can be completed by implementing that single component. |
|
|
|
For the risk and time it was a engineering judgement and no specific protocol to determine the values. |
|
|
|
The estimated risk is high for the end-effector due to the collision dynamics of the operation. |
|
|
|
It has to grab something and that is difficult to model. Furthermore, it was not known if that design would work. |
|
|
|
The SCARA has the most moving parts, but no difficult dynamics and has therefore an estimated risk of medium. |
|
|
|
For the carriage the there was no real risks and got therefore a low risk indication. |
|
|
|
|
|
|
|
The SCARA would be implemented first based on number of tests, but is dependent on the end-effector. |
|
|
|
Beginning with the end-effector is an obvious choices. It unlocks the SCARA and has the highest risk/time factor. |
|
|
|
|
|
|
|
\subsubsection{Evaluation} |
|
|
|
This first step of the detail design phase did go well. |
|
|
|
A more refined method for this step could be very useful. |
|
|
|
But the risk and time assessment will probably always be a engineering judgement from the developer. |
|
|
|
Within a design team a form of planning poker\footnote{\url{https://en.wikipedia.org/wiki/Planning_poker}{Wikipedia entry: Planning Poker}} could be a good option. |
|
|
|
|
|
|
|
\rro{Compared: Dependency, tests coverage and risk/time ratio} |
|
|
|
\rroi{First Feature/system to implement is End-effector.} |
|
|
|
\rroii{Due to dependency and high risk/time} |
|
|
|
\subsubsection{Implementation} |
|
|
|
|
|
|
|
\subsection{End-effector model} |
|
|
|
The end-effector will operate as an interface between the SCARA and the different tools. |
|
|
|
For that it has to be able to grab and release the tools. |
|
|
|
The initial design is shown in \autoref{fig:gripper}. |
|
|
|
With only some experience in modelling with collisions the decision was made to try to make some collisions in the 20-sim 3D mechanics editor. |
|
|
|
Unfortunately, collisions in a 20-sim model are difficult. |
|
|
|
There is little tooling available and there are no debugging options if the model does not behave as expected. |
|
|
|
The marker kept falling trough the gripper or flew away. |
|
|
|
With the small amount of progress made in two days the implementation was not promising. |
|
|
|
A crash in the software caused the model to corrupt, where the complete configuration of the shapes and their collisions was lost. |
|
|
|
Therefore it was decided that end-effector would be removed from the design. |
|
|
|
|
|
|
|
With the end-effector removed, the SCARA will get a direct connection with the marker. |
|
|
|
The lifting of the marker will be included in the SCARA as well. |
|
|
|
Furthermore, this means that the wiping will no be possible via the SCARA. |
|
|
|
|
|
|
|
\rro{Plan: Model a gripper} |
|
|
|
\rroi{Result: Underestimated Complexity} |
|
|
|
\rroii{No debugging options for collisions in 3D-ME} |
|
|
|
@@ -368,6 +601,15 @@ |
|
|
|
\subsubsection{Evaluation} |
|
|
|
\rro{Result is not as expected} |
|
|
|
\rro{Risk/time factor proofed itself useful} |
|
|
|
The lost progress of the model is unfortunate, but the implementation did not go expected anyway. |
|
|
|
It was probably for the best as it forced an evaluation of the design and avoided a tunnel vision while trying to get it to work. |
|
|
|
However, it did show the value of the risk/time analysis. |
|
|
|
This early failure resulted in changes for other components. |
|
|
|
But as none of the components were implemented yet, no work was lost. |
|
|
|
|
|
|
|
|
|
|
|
%%%%%%%%%%%%%%%%%%%%%%% |
|
|
|
|
|
|
|
\subsection{Feature Selection: Second Iteration} |
|
|
|
\subsubsection{Selection} |
|
|
|
\rro{Scara is next in selection} |
|
|
|
|


{kind=link}
{kind=link}