|
|
|
@@ -1,15 +1,37 @@ |
|
|
|
Together with the physics model there will be a solid 3D CAD model. |
|
|
|
The CAD model helps to check with dimensions and possible collisions of objects. |
|
|
|
With a full dynamics model in 20-sim, the next step was to design the system in OpenSCAD. |
|
|
|
Although 20-sim has a 3D editor, it is significantly easier to build components with OpenSCAD. |
|
|
|
Furthermore, for prototyping the OpenSCAD objects can be exported for 3D printing. |
|
|
|
The model made it possible to check component clearance and get an idea of size. |
|
|
|
The model is shown in \autoref{fig:scad_carriage}. |
|
|
|
\begin{figure} |
|
|
|
\centering |
|
|
|
\includegraphics[width=0.8\linewidth]{graphics/scad_carriage.png} |
|
|
|
\caption{Rendered 3D model of the SCARA} |
|
|
|
\label{fig:scad_carriage} |
|
|
|
\end{figure} |
|
|
|
To ensure that the design method resulted in a functional system, a prototype will be build from the current state of the design. |
|
|
|
Although the development only implemented a very small portion of the full design, I determined that a prototype is more valuable than repeating the development cycle for the next feature. |
|
|
|
For the construction of the prototype \ac{ots}-parts are used as much as possible and the mechanical linkages of the SCARA will be printed. |
|
|
|
To write characters on a whiteboard, drivers and controlloop have to be implemented in software. |
|
|
|
|
|
|
|
|
|
|
|
\subsection{Construction} |
|
|
|
The construction of the SCARA consists of a 3D printed mechanical structure that is actuated with stepper motors. |
|
|
|
The type of stepper motor was already chosen during the development of the SCARA. |
|
|
|
For the mechanical part I used OpenSCAD as CAD software, based on prior experience with the software. |
|
|
|
As the inverse kinematics were already determined in basic model of the SCARA they could be easily parsed to the CAD software. |
|
|
|
This allowed me to check for clearance between the mechanical parts, while repeating \autoref{test1}. |
|
|
|
The test revealed that there was collision between some parts. |
|
|
|
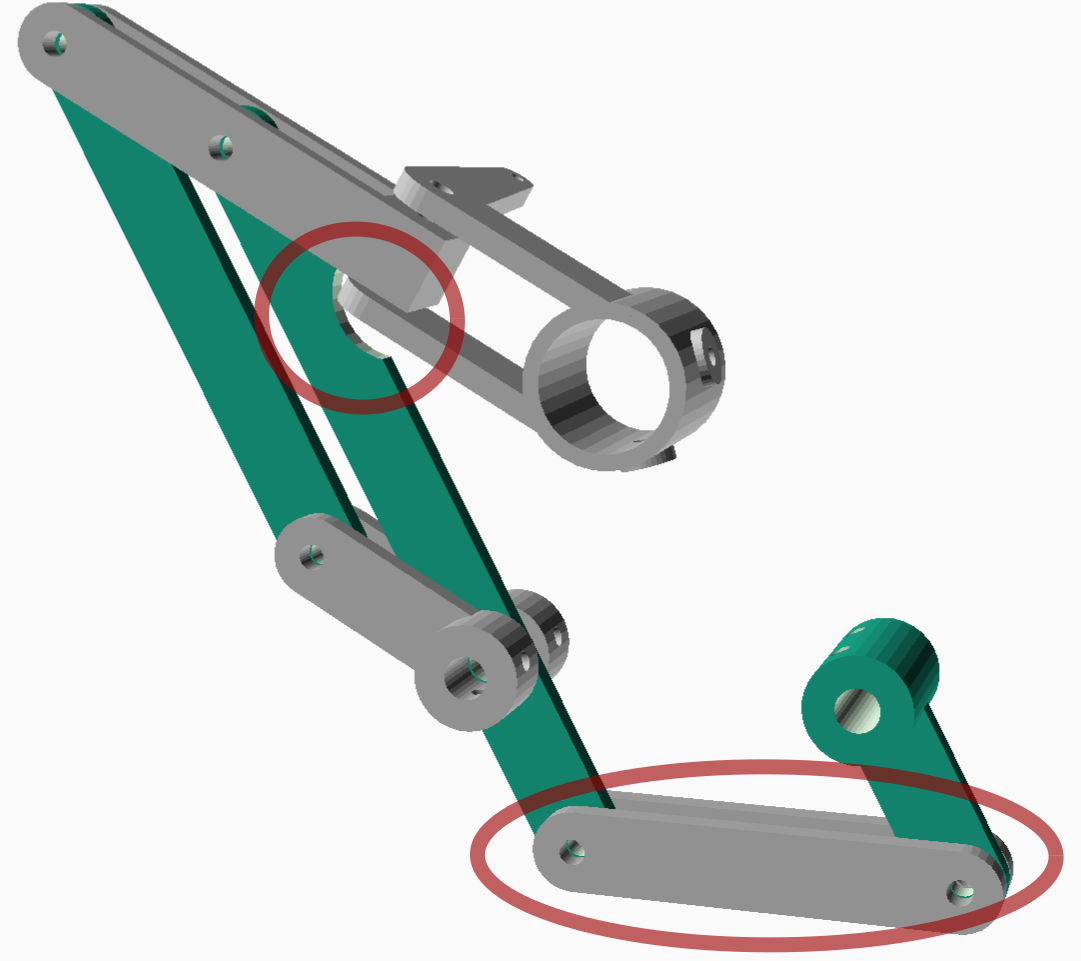
These collisions were resolved by adding a indentation and moving linkage and are shown in \autoref{fig:scad_clearance} |
|
|
|
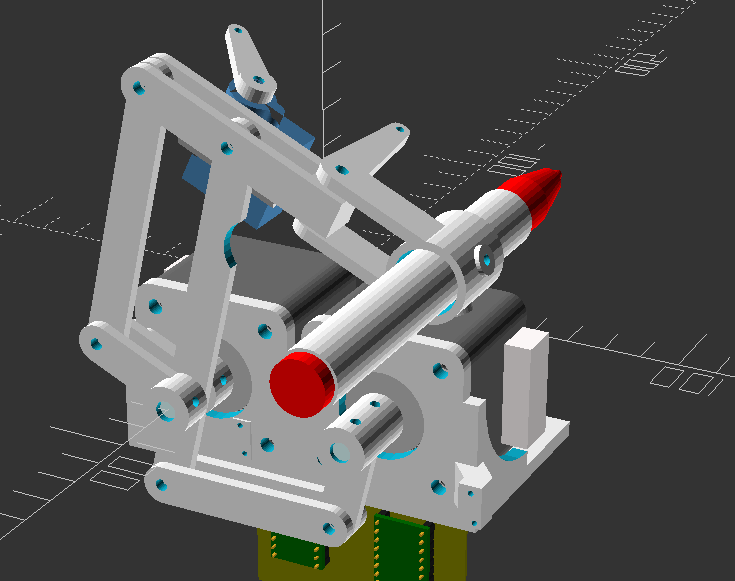
The configuration with the stepper motors, servo and marker is shown in \autoref{fig:scad_carriage}. |
|
|
|
\begin{figure} |
|
|
|
\centering |
|
|
|
\includegraphics[width=0.8\linewidth]{graphics/scad_scara_circles.png} |
|
|
|
\caption{CAD of the SCARA configuration, with the end-effector orientated in the lower left corner of the operating area. |
|
|
|
The configuration has been adapted at the two circled points, to resolve collisions in this orientation. |
|
|
|
An indentation was made to ensure that the arm could make the required corner. |
|
|
|
Furthermore, the bottom linkage has been moved from above to below the actuated joints, as this linkage would otherwise collide with the end-effector.} |
|
|
|
\label{fig:scad_clearance} |
|
|
|
\end{figure} |
|
|
|
|
|
|
|
\begin{figure} |
|
|
|
\centering |
|
|
|
\includegraphics[width=0.8\linewidth]{graphics/scad_carriage.png} |
|
|
|
\caption{Rendered 3D model of the SCARA, including steppers, marker and servo.} |
|
|
|
\label{fig:scad_carriage} |
|
|
|
\end{figure} |
|
|
|
|
|
|
|
\subsection{Implementing Behavior} |
|
|
|
Now with a physical SCARA, the last step is to implement the behavior. |
|
|
|
The stepper motors are powered via a stepper controller. |
|
|
|
The path planning for the SCARA and the operation of the stepper controller is implemented on a \ac{mcu}. |
|
|
|
|


{kind=link}
{kind=link}
{kind=link}