

3個のファイルの変更、142行の追加、0行の削除
分割表示
差分オプション
-
+142 -0initial_design/initial_design.md
-
バイナリinitial_design/overview.jpg
-
バイナリinitial_design/perspectief.jpg
+ 142
- 0
initial_design/initial_design.md
ファイルの表示
| @@ -0,0 +1,142 @@ | |||
| # Initial Design | |||
| ## Introduction | |||
| Earlier we made a document that did some exploration on the internet of existing systems. | |||
| This document explains what design we came up with that can be used as a basis for the design. | |||
| Keep in mind that our design is to test the design method not to create the optimal system. | |||
| ## Travel across the board | |||
| So the first step was to look at how we would get the marker in the correct position. | |||
| We will discuss the 5 different actuation designs we found. | |||
| ### Cartesian robot | |||
| A [Cartesian Robot](https://en.wikipedia.org/wiki/Cartesian_coordinate_robot) has a remarkable simple design, a carriage on a horizontal rail (gantry). | |||
| And one or two vertical rails that can move the horizontal rail. | |||
| Or in robot terms, two perpendicular prismatic joints. | |||
| This is directly why this idea can be scraped. | |||
| It is too simple and it is suspected that it does not cover the design method aspects sufficiently. | |||
| Furthermore, the real difficulty is sourcing the materials for linear bearings. | |||
| Concluding: | |||
| - Simple design, no challenge in modelling | |||
| - linear bearings are expensive | |||
| ### Polar coordinate robot | |||
| Another simple design where the carriage is on the end of a rail. | |||
| The rail itself is mounted on a pivot point and can be extended or retracted. | |||
| Again in robot terms, one prismatic joints on top of a rotational joint. | |||
| Similar to the gantry does this require linear bearings. | |||
| However, this design introduces some additional difficulties. | |||
| Any play in the pivot point gets amplified by the long free-hanging arm. | |||
| Making the arm stiff and light is in this case very difficult. | |||
| There is also a space limitation as setup has a working area of a circle. | |||
| With the arm length equal to the radius of the circle. | |||
| At least half the circle is outside of the board, but is still occupied by the arm as it stick out. | |||
| This is wasted space. | |||
| Furthermore, the dynamics are simple but very impractical to write readable on the board. | |||
| - Simple design, no challenge in modelling | |||
| - linear bearings are expensive | |||
| - pivot point is weak | |||
| - inertia of arm is too big for fast movement | |||
| - Requires additional room for arm sticking out. | |||
| ### SCARA | |||
| A [SCARA](https://en.wikipedia.org/wiki/SCARA) consists of two arms that are connected via rotational joints. | |||
| These are dynamic interesting and have some nice aspects to them. | |||
| Although they have similar issues as the rotating arm with speed due to the large inertia. | |||
| They have the great improvement of space efficiency. | |||
| Where the previous arm length is directly the maximum range, the SCARA can fold. | |||
| It has a working area of a full circle but has a much smaller area that is required. | |||
| This space saving does introduce the problem of singularity. | |||
| But as said earlier, this makes the design more interesting. | |||
| It does have two types of construction. | |||
| - The simplest form has a two actuated rotational joints, one from ground to the first arm. Another one from first to second arm. | |||
| - The other has four arms and five rotational joints where two joints are actuated. The actuation is done between ground and the first two arms. The other two arms create connect these two arms forming a parallelogram. | |||
| Thus: | |||
| - Interesting dynamics. | |||
| - No linear bearings | |||
| - Low stiffness. | |||
| - high inertia when moving the arm. | |||
| - Singularity | |||
| ### Cable robot | |||
| A really simple construction but more difficult dynamic robot is a cable robot. | |||
| Basic components are cables, spools and motors, two from each. | |||
| It can be seen as two prismatic joints. | |||
| However, they are not perpendicular anymore, this creates some nice dynamic behavior. | |||
| Difficulties are that the system has low damping. And it is expected to show some swinging behavior. | |||
| - Simple construction | |||
| - Cheap | |||
| - Difficult to control | |||
| - Interesting dynamics | |||
| ## Combining | |||
| My supervisor and I discussed the different options of actuation in a brainstorm session. | |||
| We came to the conclusion that all systems were to simple to cover the different aspects of the design method. | |||
| Therefore, we decided on combining two systems, the cable bot with a SCARA. | |||
| The SCARA will provide us speed and the cable bot will provide us with range. | |||
| Both systems can be developed separate from each other, providing specific different features. | |||
| The cable bot scales very well, only limitation is the wire length. But that should not be a problem. | |||
| Sources on the internet do show some difficulties: | |||
| ### Internet lessons for this design | |||
| #### Oscillation | |||
| In this [example](https://www.youtube.com/watch?v=GgOi8WaNoIs) it is visible that the pencil mount is really light compared to the weight of the belts. | |||
| It looks like the input signal to the servos are all step responses. This is also clearly shown in the behavior of the pencil. | |||
| #### Constant tension | |||
| This [plotter](https://www.youtube.com/watch?v=xMw1Uj4MwNo) shows a simple solution by adding weights on the top pulleys and moving the servos to the lower corners. | |||
| This delivers nice tension on the carriage and creates a better compenstation for the servos. | |||
| Problem in this case is that the wires block the board. | |||
| #### Cable management | |||
| A common problem with these kinds of projects is cable management. [One example](https://shop.evilmadscientist.com/productsmenu/846) solved this by weaving cables true a long narrow strip of plastic. | |||
| This way the cables have a lower change of getting entangled. | |||
| #### KISS | |||
| A very good example of the most [simple plotter](https://www.youtube.com/watch?v=u4Jh1daCl60) exists of three servos, two lolly sticks and a clothespin. | |||
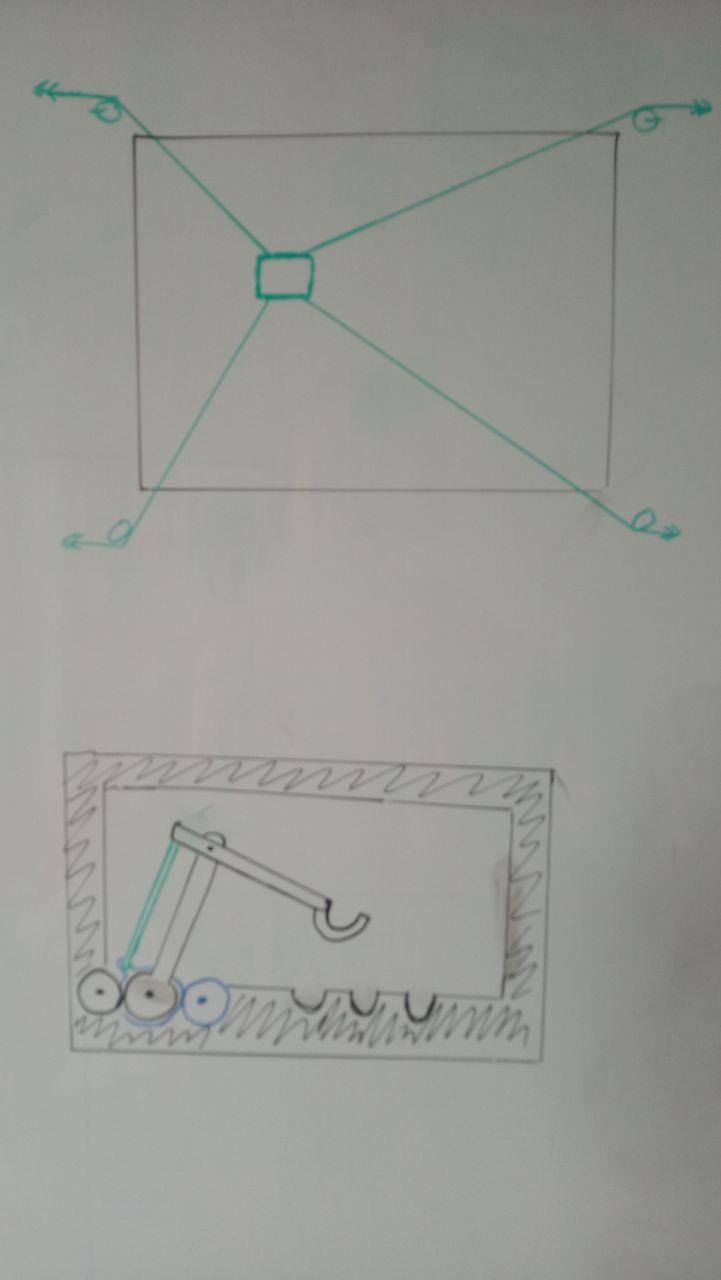
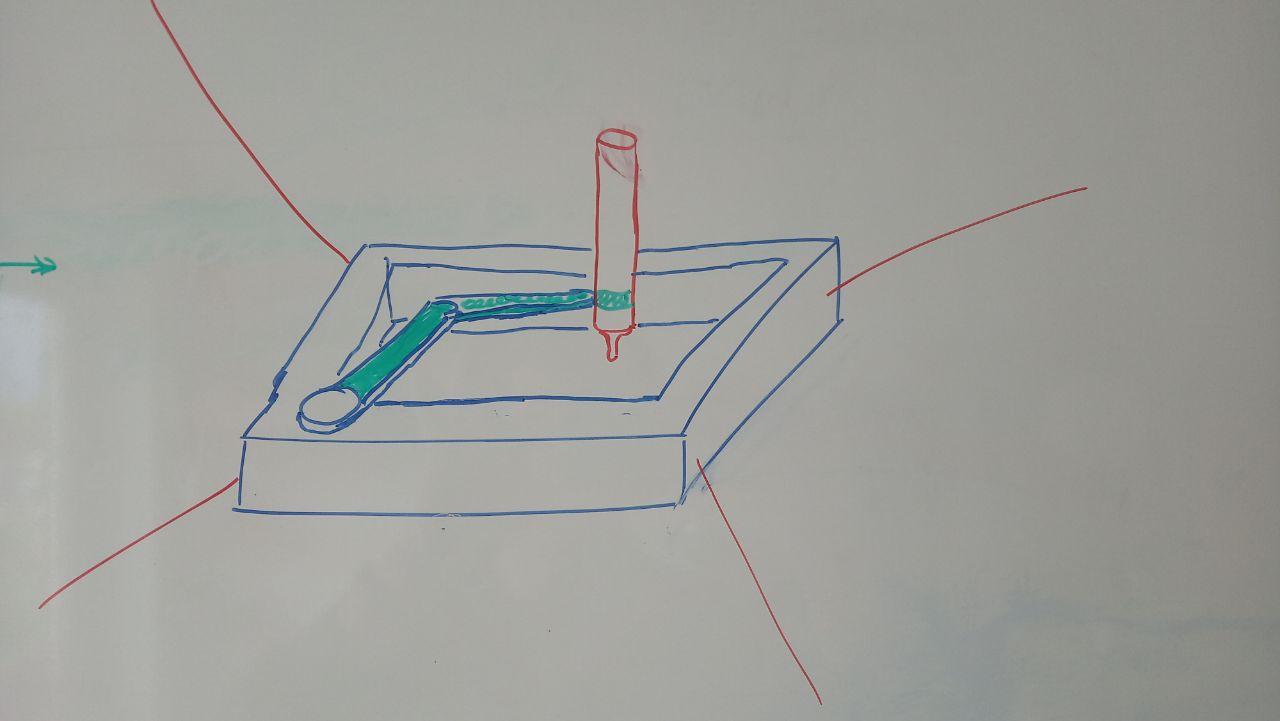
| ## Rough design | |||
| **Note that this is a design idea! It is possible to deviate from this plan at any point during the design.** | |||
| So, a wire construction is currently the way to go. | |||
| The carriage will get a 3 DoF SCARA. | |||
| And in a later stage this arm can switch between marker and cleaner. | |||
|  | |||
|  | |||
| First the cable design will steer the carriage roughly in the right direction. | |||
| Depending on the stability. The carriage will lock itself to the whiteboard with magnets or something similar. | |||
| Then the SCARA will write one or more characters on the board. | |||
| The carriage decouples, is moved and can then write the next line of characters. | |||
| If the whiteboard has to be cleaned, the arm will switch the pencil for a wiper. | |||
| One idea is to make the wiper rotatable on the arm and provide the rotational force from a rack and pinion setup. | |||
| One side of the carriage will have a rack and the arm will move the gear/pinion of the wiper along the rack. | |||
| This makes it possible to loosely hold the wiper but still provide enough wiping speed. | |||
| Otherwise we have to make a inter changeable tool that locks really well to the arm. | |||
| Pushing the wiper on to the board would also require a force in perpendicular to the movement plane of the arm. | |||
| As you might notice, the plan becomes vague at this point. | |||
| Furthermore, if the arm is able to change between the wiper and the marker it can also switch for different markers as well. | |||
| ### Features | |||
| For the next step we will have to split the initial design step into features. | |||
| From a quick sketch we were able to determine the following features: | |||
| - **SCARA** for the fine movement | |||
| - **Tool Change** for attaching different colors or a wiper to the arm | |||
| - **Writing** writing behavior | |||
| - **Wiping** behavior | |||
| - **Cariage** Device where the scara will be attached to | |||
| - **Positioning** cable system to move the cariage. | |||
バイナリ
initial_design/overview.jpg
ファイルの表示
{kind=link}
| 変更前 | 変更後 |
|---|---|
|
|
| 幅: 721 | 高さ: 1280 | サイズ: 38KB |
バイナリ
initial_design/perspectief.jpg
ファイルの表示
{kind=link}
| 変更前 | 変更後 |
|---|---|
|
|
| 幅: 1280 | 高さ: 721 | サイズ: 46KB |